


Giới thiệu về các phương pháp điều khiển động cơ tuyến tính
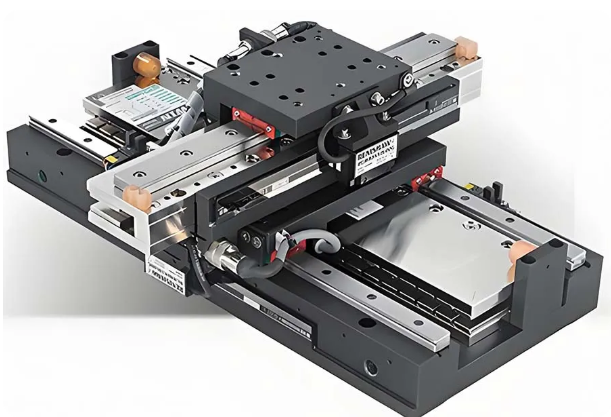
Động cơ tuyến tính là động cơ có thể chuyển đổi trực tiếp năng lượng điện thành chuyển động tuyến tính. Chúng được sử dụng rộng rãi trong tự động hóa, rô bốt, gia công chính xác và các lĩnh vực khác. So với động cơ quay truyền thống, động cơ tuyến tính có ưu điểm là cấu trúc đơn giản, phản ứng nhanh và độ chính xác điều khiển cao. Để phát huy hết hiệu suất của động cơ tuyến tính, các phương pháp điều khiển hợp lý đặc biệt quan trọng. Bài viết này sẽ giới thiệu một số phương pháp điều khiển động cơ tuyến tính phổ biến, bao gồm điều khiển PID, điều khiển mờ, điều khiển chế độ trượt và điều khiển thích ứng.
1. Điều khiển PID
Điều khiển PID (tỷ lệ-tích phân-vi phân) là phương pháp điều khiển phản hồi cổ điển được sử dụng rộng rãi trong các hệ thống điều khiển công nghiệp. Trong điều khiển động cơ tuyến tính, bộ điều khiển PID điều chỉnh tín hiệu đầu vào để đạt được trạng thái chuyển động mong muốn bằng cách theo dõi vị trí, tốc độ và gia tốc của động cơ theo thời gian thực.
1.1 Nguyên lý
Bộ điều khiển PID bao gồm ba phần:
Điều khiển tỷ lệ (P): Điều chỉnh theo lỗi hiện tại (chênh lệch giữa vị trí mục tiêu và vị trí thực tế). Sai số càng lớn, hiệu ứng điều khiển càng mạnh.
Điều khiển tích phân (I): Tích lũy các sai số trong quá khứ, loại bỏ các sai số trạng thái ổn định và đảm bảo rằng hệ thống cuối cùng đạt đến vị trí mục tiêu.
Điều khiển vi phân (D): Dự đoán xu hướng thay đổi sai số, cung cấp khả năng điều khiển dự đoán và giảm độ quá mức và dao động.
1.2 Ưu điểm và nhược điểm
Ưu điểm: Đơn giản và dễ triển khai, phù hợp với hầu hết các hệ thống tuyến tính và có thể cải thiện hiệu quả độ ổn định và tốc độ phản hồi của hệ thống.
Nhược điểm: Đối với các hệ thống phi tuyến tính và hệ thống thay đổi theo thời gian, hiệu suất của điều khiển PID có thể không lý tưởng và quá trình điều chỉnh các tham số cũng tương đối phức tạp.
2. Điều khiển mờ
Điều khiển mờ là phương pháp điều khiển dựa trên logic mờ, phù hợp để giải quyết các vấn đề không chắc chắn và phi tuyến tính. Trong điều khiển động cơ tuyến tính, bộ điều khiển mờ lấy đầu ra điều khiển thông qua các quy tắc mờ, có thể đối phó hiệu quả với các thay đổi động của hệ thống.
2.1 Nguyên lý
Bộ điều khiển mờ chủ yếu bao gồm bốn phần: mờ hóa, cơ sở quy tắc, cơ chế suy luận và giải mờ. Đầu tiên, các biến đầu vào (như lỗi vị trí và lỗi tốc độ) được làm mờ, sau đó suy luận được thực hiện theo các quy tắc mờ được cài đặt trước và cuối cùng kết quả đầu ra được giải mờ để thu được tín hiệu điều khiển.
2.2 Ưu điểm và nhược điểm
Ưu điểm: Không yêu cầu mô hình toán học chính xác, có thể xử lý các hệ thống phức tạp và không chắc chắn, và có khả năng thích ứng mạnh.
Nhược điểm: Cần có kinh nghiệm để thiết kế các quy tắc mờ, hiệu suất hệ thống phụ thuộc vào chất lượng của cơ sở quy tắc và quá trình gỡ lỗi có thể phức tạp.

3. Điều khiển chế độ trượt
Điều khiển chế độ trượt là phương pháp điều khiển mạnh mẽ có thể xử lý hiệu quả sự không chắc chắn của các tham số hệ thống và nhiễu loạn bên ngoài. Ý tưởng cốt lõi của nó là điều khiển hệ thống bằng cách thiết kế một bề mặt trượt sao cho trạng thái hệ thống trượt trên bề mặt trượt.
3.1 Nguyên tắc
Quy trình thiết kế điều khiển chế độ trượt thường bao gồm hai bước:
Lựa chọn bề mặt trượt: Chọn một bề mặt trượt phù hợp sao cho trạng thái hệ thống có thể trượt trên bề mặt trượt.
Thiết kế luật điều khiển: Thiết kế luật điều khiển sao cho trạng thái hệ thống vẫn ổn định trên bề mặt trượt và nhanh chóng đạt đến trạng thái mục tiêu.
3.2 Ưu điểm và nhược điểm
Ưu điểm: Nó có độ bền cao đối với các thay đổi tham số hệ thống và nhiễu loạn bên ngoài, và phù hợp với các trường hợp điều khiển có độ chính xác cao.
Nhược điểm: Việc chuyển đổi điều khiển thường xuyên có thể gây ra hiện tượng “rung lắc” và quy trình thiết kế tương đối phức tạp.
4. Điều khiển thích ứng
Điều khiển thích ứng là phương pháp điều khiển có thể tự động điều chỉnh các tham số điều khiển theo các thay đổi động của hệ thống và phù hợp với các hệ thống có tham số không chắc chắn hoặc thay đổi.
4.1 Nguyên tắc
Hệ thống điều khiển thích ứng thường bao gồm hai phần:
Bộ điều khiển: Tạo tín hiệu điều khiển dựa trên trạng thái hệ thống hiện tại.
Cơ chế thích ứng: giám sát hiệu suất hệ thống theo thời gian thực và điều chỉnh các tham số bộ điều khiển theo các chỉ số hiệu suất đã đặt.
4.2 Ưu điểm và nhược điểm
Ưu điểm: Có khả năng ứng phó với những thay đổi trong các tham số hệ thống và phù hợp với môi trường điều khiển phức tạp và không chắc chắn.
Nhược điểm: Thiết kế và triển khai tương đối phức tạp và có thể đòi hỏi sức mạnh tính toán mạnh.
5. Các phương pháp điều khiển khác
Ngoài các phương pháp điều khiển trên, các chiến lược điều khiển tiên tiến khác cũng có thể được sử dụng trong điều khiển động cơ tuyến tính, chẳng hạn như điều khiển mạng nơ-ron và điều khiển dự đoán mô hình (MPC). Các phương pháp này thường kết hợp lý thuyết điều khiển hiện đại với công nghệ máy học để cải thiện hơn nữa độ chính xác điều khiển và hiệu suất hệ thống.
Kết luận
Trong các ứng dụng thực tế, việc lựa chọn các phương pháp điều khiển phù hợp đòi hỏi phải cân nhắc toàn diện dựa trên các yêu cầu hệ thống cụ thể, các chỉ số hiệu suất và điều kiện môi trường. Với sự tiến bộ không ngừng của công nghệ, các phương pháp điều khiển động cơ tuyến tính trong tương lai sẽ trở nên thông minh và hiệu quả hơn, thúc đẩy sự phát triển tự động hóa và độ chính xác của nhiều ngành công nghiệp khác nhau.









0 Comments